品牌安川
额定电压5V
平均无故障时间1h
响应时间1m
全新程度二手
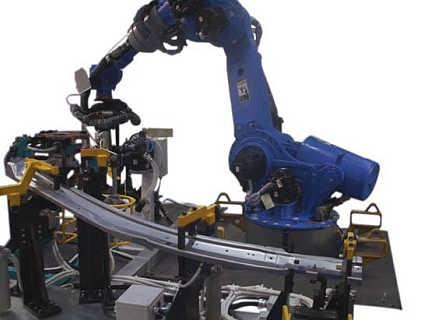
安川焊接机器人系统特点与优势:
1.安川机器人MA1900是业内*适合弧焊的长臂型工业机器人之一,其电缆内置于机械臂内,能有效避免焊枪与夹具、工件之间的干涉,其适用于碳钢,不锈钢,镀锌板,铝合金等多种材料的焊接;
2.MA1900相比于其他品牌相同规格的工业机器人拥有更快的动作速度;
3.机械臂内装有防碰撞传感器,当机械臂由于操作不当等撞击物体时,系统急停,能很好的保护机器人;
4、伺服控制器通过自动化接口可很方便地进行操作模块和现场总线模块的转换,同时使用不同的现场总线模块实现不同的控制模式(RS232、RS485、光纤、InterBus、ProfiBus),而通用变频器的控制方式比较单一。
5、伺服控制器直接连接旋转变压器或编码器,构成速度、位移控制闭环。而通用变频器只能组成开环控制系统。
6、伺服控制器的各项控制指标(如稳态精度和动态性能等)优于通用变频器。

安川机器人的使用注意事项
安川机器人使用性能不断提升,具备高速、高精度、高质量、易于操控和售后维修,机器人控制器系统也随着向基于PC机的开放式控制器动方向转型,易于规范化、智能化;器件集成度提升,控制箱越来越精巧,且选用模块化设计构造:明显提高了系统的可靠性、易可操作性和可维修,做到虚拟现实在机器人中的作用已从模拟仿真、演练转型到用以过程管理以使遥控机器人操作者形成置身远程操作环境中的感觉来操纵安川机器人。那么在具体的操控使用过程中必须注意什么呢?
1、在操控安川机器人之前必须要注意检测电器控制箱内是不是有水、油进入,若电器设备返潮,千万不要开机,而且要检测供电电压是不是符合标准,前后安全门开关是不是一切正常。确认电动机的转动方向是不是一致。随后开启开关电源,
2、在安川机器人必须拆除的情况下,其中对关闭射出机电源;关闭机器人开关电源;关闭机器人气压源,置于空压状态。放松引拔汽缸稳定板固定螺丝,并挪动手臂,使其接近拱。挪动缓冲器座,使其接近手臂。旋紧引拔汽缸稳定板,让手臂无法挪动。将转动安全螺丝锁上,使安川机器人无法转动,这些细节对于日后的操作和维护都是有直接关系的。
安川机器人在机床设备上的应用?
安川机器人在机床设备上的应用越来越普遍,也是提高机床设备精度和工艺改进的关键性部件,运动控制是保证机床精度的一个关键因素,而安川机器人主要完成运动控制的过程。因此,近年来机床企业介入安川机器人制造的热情愈发高涨。
机床越精密,其附加值越高,机床精密度一直是**机床业不懈追求的目标。微纳时代的出现就离不开新兴技术的扶持,机床工具行业的智能化技术目前应用**。安川机器人的出现更是进一步提升了机床微纳的水平,内外工业机器人产业快速发展,已成为智能制造和工业自动化的关键技术和重要产品,也是数控机床走向自动化更高阶段不可缺失的重要一环。
不仅是数控系统制造企业,机床整机企业对机器人领域也是非常青睐,比如大连机床在今年召开的*六届中国络化,伺服驱动技术的数字化和分散化,多传感器融合技术的实用化,工作环境设计的优化和作业的柔性化,以及系统的网络化和智能化等方面。这正是国内机床产品升级的方向和发展趋势。机床企业掌握了这些技术,跨入机器人领域是一种必然,但是必须综合权衡自身企业的技术、品牌、资金、市场等方面的优势来定位开发机器人项目。
我国机器人产业还很薄弱,机器人研究仍然任重而道远。我国在某些关键技术上有所突破,但还缺乏整体核心技术的突破,尤其在自动控制、精加工和材料方面,具有中国知识产权的机器人很少,主要集中在上银科技出品的KK系列和银泰科技出品的KM系列。不少关键器件至今尚不能自己生产或者性能不高,这些因素已经开始严重影响国产机器人做大做强步伐。
目前,我国市场上机器人总共拥有量近万台,仅占**总量的0.56%,其中完全国产机器人行业集中度仅为占30%,其余皆为从日本、美国、瑞典、德国、意大利等20多个国家引进。究其原因,很大程度在于自主品牌不够,发展壮大自主品牌及其自动化成套装备产业成为当务之急。

在操纵安川机器人时有哪些注意事项?
安川机器人是由人工操控的机械手,操作者手动操控机械手臂结束机械手的上下运动和回转运动等动作,并经过操控气动开关实现夹具的夹持,进而进行工件的搬运、移动、装配等工作。它的应用能够 缓解操控人员的劳动强度,实现运送大质量工件时操控轻巧和定位精确,那么能量如此大的安川机器人操控的时候有什么注意事项呢?接下来就来为大家讲解下:
1、系统通气前,要先查看一下每个操控开关的方向是不是准确,机器人应远离设备和人员,防止手臂忽然翘起导致人员受伤等安全事故;
2、安川机器人不应用时,要查验每个按钮是不是都恢复到“关闭”状态;
3、起吊重量不可以**出的起吊量;
4、不可以将手、脚及身体的一切部位伸进吊物下面;
5、不可以将手或手指伸进机械臂的空隙;
6、操控中脸和手不可以伸进安川机器人的**部或零配件上部;
7、在没有确定工件是不是夹紧前,不可以带载操控机械手,以防工件滑掉;
8、不可以选用使得重物偏移、溃散的操作方式,即操控中不可以剧烈摇晃机械手臂;
9、操控人员工作时所有人不可以进入工作现场;
10、操控人员离开工作现场时,应将该设备摆放到空闲位置,机械手夹具放在很低。
-/gbahhgh/-
http://wgpdsj.cn.b2b168.com






